
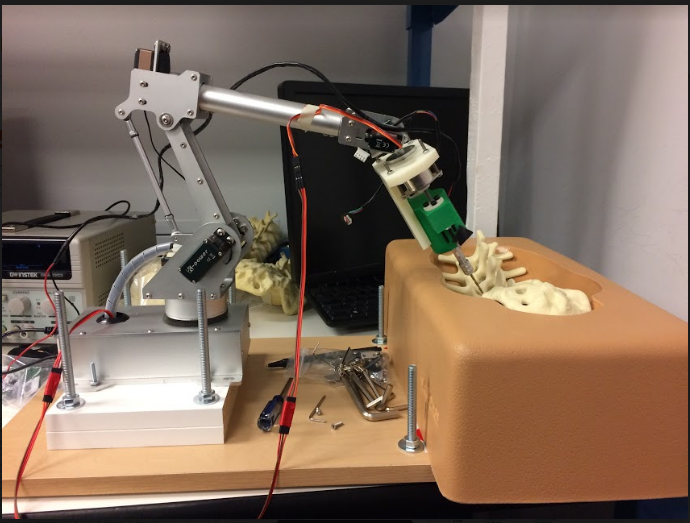
The 7bot arm shown above is being used to program our SCAN robotic system.
Our team is working on designing a spinal cannulation automated navigation (SCAN) robotic system to aid surgeons in performing pedicle screw placement into the pedicle bone located within the vertebrae of the lumbar region of the spine. The project involves being able to accurately and precisely navigate to the pedicle of interested at a specified angle following a trajectory that starts at the lateral end of the pedicle bone and ending at the medial edge. The pedicle hole being cannulated is being done via a linearized drill designed by our team that is being attached to the robot’s end effector. With the proper dimensions of the pedicle bone obtained through x-ray images using fluoroscopy, it is possible to control and maneuver the robotic arm in an angular position so that it may consequently move in and out of the pedicle via linearized motion in the drilling of the pedicle. Hence, the SCAN robotic system will be able to significantly reduce human errors as a result of poor accuracy or precision by improving the outcomes of pedicle screw placement. Additionally, our aim is to reduce the amount of intraoperative images being taken as well so that radiation exposure for the patients and surgeons may be reduced.